AGV的驅動(dòng)方(fāng)式
2021/2/3 15:38:40 點(diǎn)擊:2099
(1)單驅動(dòng)
用于三(sān)輪車型:一(yī)个(gè)驅動(dòng)兼转向(xiàng)輪,两(liǎng)个(gè)固定(dìng)從動(dòng)輪(分布(bù)在(zài)車體(tǐ)軸線(xiàn)的两(liǎng)邊(biān))。这(zhè)种車型可以(yǐ)前進(jìn)、後(hòu)退、左(zuǒ)右(yòu)转彎(转角(jiǎo)小于90°)。因(yīn)三(sān)輪結構的抓地(dì)性(xìng)好(hǎo),对(duì)地(dì)表(biǎo)面(miàn)要(yào)求一(yī)般,适用于廣泛的环(huán)境和(hé)场(chǎng)合。
(2)差速驅動(dòng)
常见有(yǒu)三(sān)輪和(hé)四(sì)輪两(liǎng)种車型:两(liǎng)个(gè)固定(dìng)驅動(dòng)輪(分布(bù)在(zài)車體(tǐ)軸線(xiàn)的两(liǎng)邊(biān)),一(yī)个(gè)(三(sān)輪車型)或(huò)两(liǎng)个(gè)(四(sì)輪車型)從動(dòng)自(zì)由(yóu)輪,转彎靠两(liǎng)个(gè)驅動(dòng)輪之(zhī)間(jiān)的速度(dù)差實(shí)現(xiàn)。这(zhè)种車型可以(yǐ)前進(jìn)、後(hòu)退、左(zuǒ)右(yòu)转彎(转角(jiǎo)大(dà)于90°)、原地(dì)自(zì)旋,转彎的适應(yìng)性(xìng)比單驅動(dòng)強(qiáng)。若是(shì)三(sān)輪車型,对(duì)地(dì)表(biǎo)面(miàn)的适用性(xìng)和(hé)單驅動(dòng)類(lèi)似。若是(shì)四(sì)輪車型,因(yīn)容易造成(chéng)其(qí)中(zhōng)某一(yī)个(gè)輪懸空(kōng)而(ér)影響導航,故对(duì)地(dì)表(biǎo)面(miàn)平整度(dù)要(yào)求苛刻(kè),适用範圍受到(dào)一(yī)定(dìng)限制。
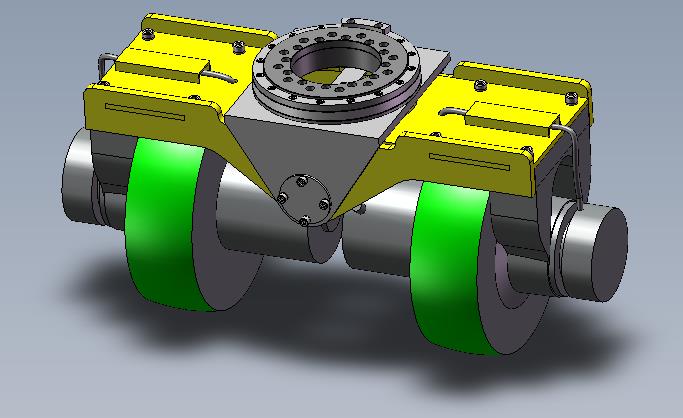
(3)双(shuāng)驅動(dòng)
用于四(sì)輪車型:两(liǎng)个(gè)驅動(dòng)兼转向(xiàng)輪,两(liǎng)个(gè)從動(dòng)自(zì)由(yóu)輪。这(zhè)种車型可以(yǐ)前進(jìn)、後(hòu)退、全(quán)方(fāng)位(wèi)(万(wàn)向(xiàng))行駛。突出(chū)特點(diǎn)是(shì)可以(yǐ)在(zài)行駛过(guò)程中(zhōng)控制車身(shēn)姿态的任意變(biàn)化(huà),适用于狹窄(zhǎi)通(tòng)道(dào)或(huò)对(duì)作(zuò)業方(fāng)向(xiàng)有(yǒu)特别要(yào)求的环(huán)境和(hé)场(chǎng)合。缺點(diǎn)和(hé)差速驅動(dòng)的四(sì)輪車型類(lèi)似,对(duì)地(dì)表(biǎo)面(miàn)平整度(dù)要(yào)求苛刻(kè),适用範圍受到(dào)一(yī)定(dìng)限制;此(cǐ)外(wài),結構複雜,成(chéng)本(běn)較高(gāo)。
(4)多(duō)輪驅動(dòng)
用于八(bā)輪車型:四(sì)个(gè)驅動(dòng)兼转向(xiàng)輪,四(sì)个(gè)從動(dòng)自(zì)由(yóu)輪。这(zhè)种車型可以(yǐ)前進(jìn)、後(hòu)退、全(quán)方(fāng)位(wèi)行駛。應(yìng)用于重(zhòng)载(zài)行業輸送,結構複雜,成(chéng)本(běn)較高(gāo)。
- 上(shàng)一(yī)篇(piān):AGV小車具有(yǒu)哪些(xiē)特點(diǎn) 2021/2/3
- 下(xià)一(yī)篇(piān):AGV的用途和(hé)結構分類(lèi) 2021/2/3